 Image 1 of 4
Image 1 of 4
 Image 2 of 4
Image 2 of 4
 Image 3 of 4
Image 3 of 4
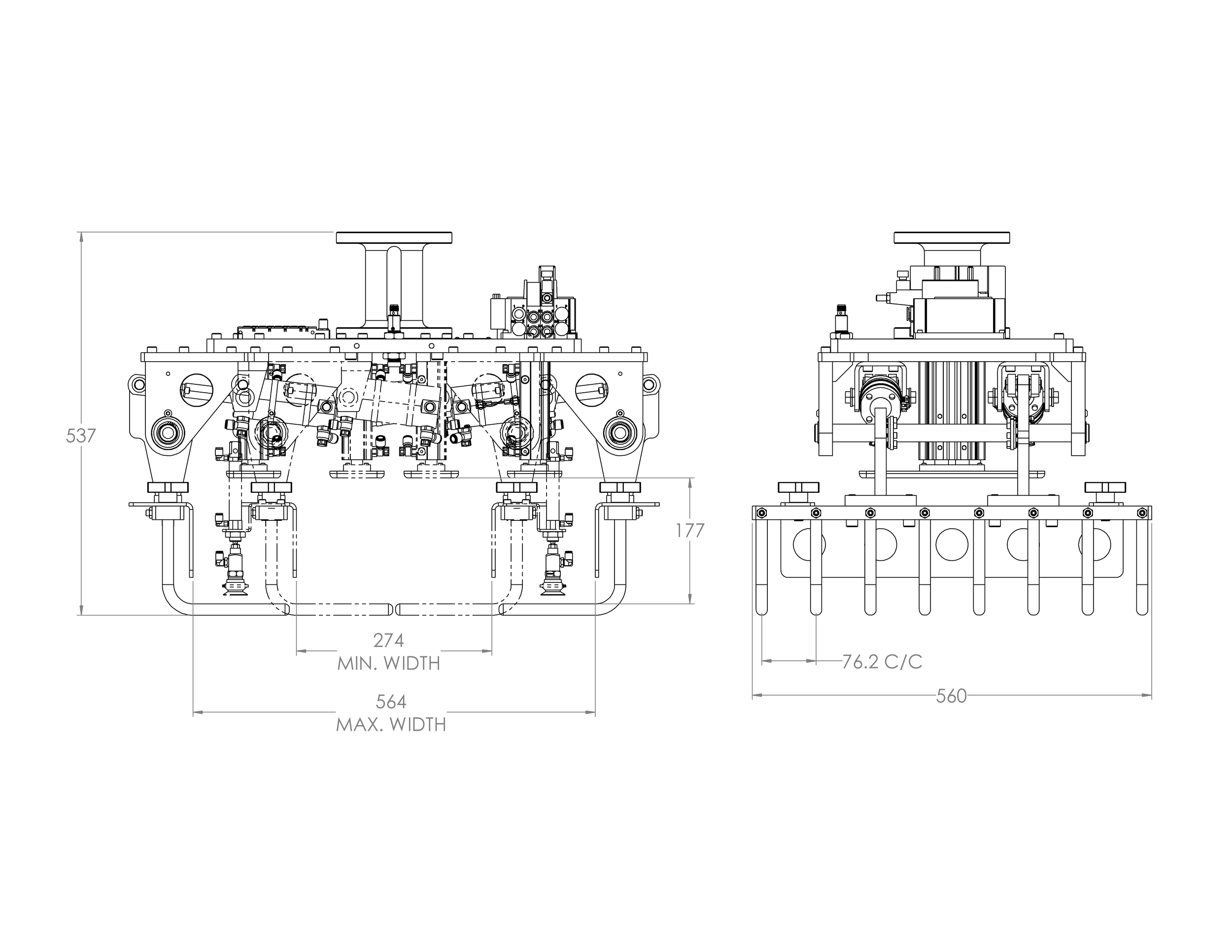 Image 4 of 4
Image 4 of 4
A popular mid line bag gripper designed for pick and place of loose bags. Bag gripper with a 50kg payload for the palletizing of various bags. Ideal for low frequency bag size changes, you can change the bag width from 274mm to 564mm in a matter of minutes with one tool. Standard features include pneumatic clamping to hold down the bag during robot transport, valve manifold and sensors wired back to I/O block. Robot mounting configured to your requirements. Available options include, hooks for pallet pick up and retractable vacuum cups for slip sheet placement.
Robot mounting configured to your requirements
Adjustable bag width
Pneumatic hold down
76 mm finger pitch
Solid stainless-steel gripper fingers, radiused ends to avoid bag damage
PSS, pneumatic slip sheet
PPU, pallet pick up
Customization
Tool weight = ~50 kg
Max. payload = 50 kg
A popular mid line bag gripper designed for pick and place of loose bags. Bag gripper with a 50kg payload for the palletizing of various bags. Ideal for low frequency bag size changes, you can change the bag width from 274mm to 564mm in a matter of minutes with one tool. Standard features include pneumatic clamping to hold down the bag during robot transport, valve manifold and sensors wired back to I/O block. Robot mounting configured to your requirements. Available options include, hooks for pallet pick up and retractable vacuum cups for slip sheet placement.
Robot mounting configured to your requirements
Adjustable bag width
Pneumatic hold down
76 mm finger pitch
Solid stainless-steel gripper fingers, radiused ends to avoid bag damage
PSS, pneumatic slip sheet
PPU, pallet pick up
Customization
Tool weight = ~50 kg
Max. payload = 50 kg